关于GPS北斗卫星定位系统开发过程中的一些坑(关于北斗卫星的相关资料)
更新时间:2026-03-09 12:38:17
在物联网、车联网、人员定位等项目中,GPS北斗卫星定位系统几乎是绕不开的基础能力。看起来只是“拿坐标、画点、存轨迹”,但真正做下来才发现:坑一个接一个,而且很多是“隐形坑”。
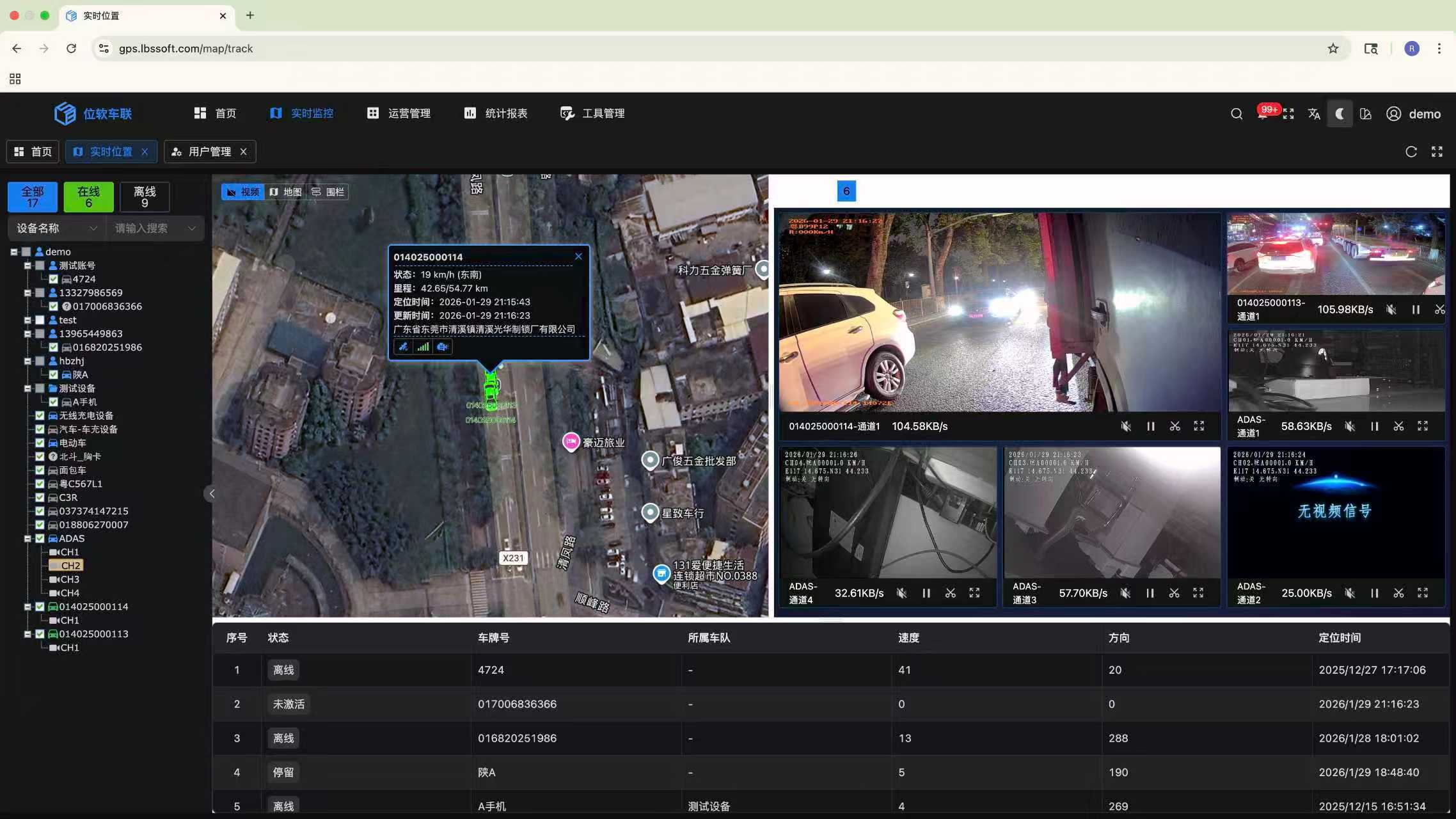
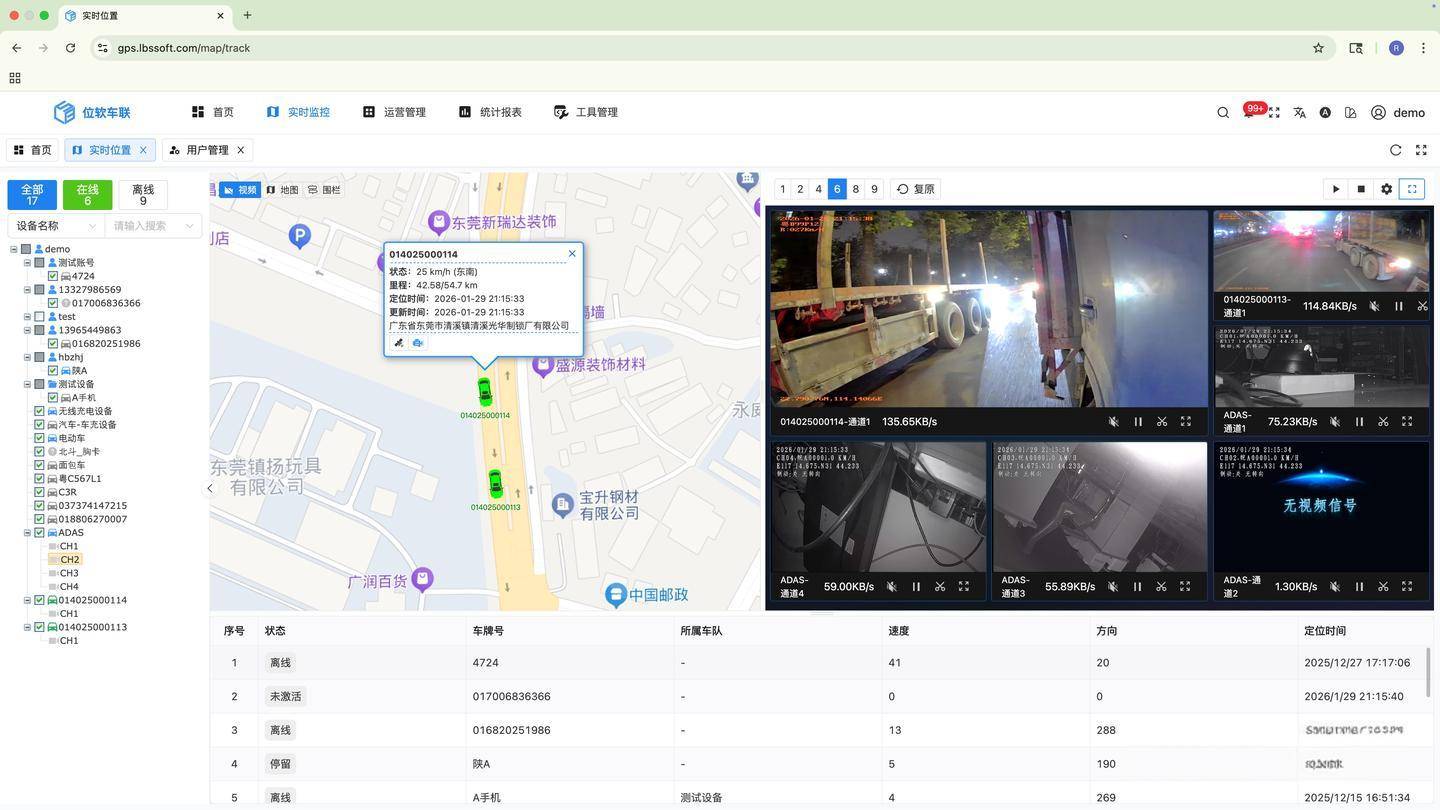
本文结合实际项目经验,从硬件、数据、算法、系统架构等多个维度,聊一聊在 GPS、 北斗定位系统开发过程中常见的一些坑,下面这张图是我们经过十几年开发的LBSSoft gps北斗卫星定位视频监控系统的界面,支持jtt808、jtt1078、gt06、gt02、jtt809等各种协议希望能帮后来者少走点弯路。
1️⃣ 首次定位时间(TTFF)远比想象中长
坑点:
- 冷启动时,设备首次定位可能需要 30 秒 ~ 数分钟
- 在地下车库、室内、城市高楼环境,可能直接“永远搜不到星”
原因:
- 星历数据未缓存
- 天线方向、尺寸、地平面设计不合理
- 电源干扰、射频干扰严重
经验建议:
- 支持 热启动 / 温启动
- 使用 AGPS / EPO(通过网络预下载星历)
- 天线一定要“尊重射频设计”,别只看价格
2️⃣ 北斗 ≠ GPS,混合定位才是现实
坑点:
- 以为“支持北斗”就万事大吉
- 实际定位精度和稳定性不如预期
现实情况:
- 大多数『芯片』是 GPS + 北斗 + GLONASS + Galileo 多模
- 不同地区,不同星座表现差异很大
经验建议:
- 关注 并发可见星数
- 不要强制锁死某一星座
- 定位质量指标(HDOP、PDOP)一定要用起来
3️⃣ 坐标在“跳”,但设备没在动
典型现象:
- 车辆静止,但轨迹在地图上“抖动”
- 速度为 0,却产生大量轨迹点
原因:
- 定位本身存在误差(5~20 米很常见)
- 没有做任何滤波和去噪
解决思路:
- 引入 速度阈值
- 引入 距离阈值
- 使用 卡尔曼滤波 / 滑动平均
4️⃣ 时间戳不统一,轨迹全乱
坑点:
- 有的用设备时间
- 有的用『服务器』接收时间
- 有的直接用数据库当前时间
后果:
- 轨迹回放乱序
- 轨迹断层、倒退
- 轨迹分析全部不准
经验建议:
- 以设备定位时间为主
- 『服务器』时间只做补充
- 明确时区(UTC / 本地时间)
5️⃣ 坐标偏移问题,永远绕不开
经典大坑:
- 北斗 / GPS 原始坐标:WGS-84
- 国内地图(高德、腾讯):GCJ-02
- 百度地图:BD-09
现象:
- 点位整体偏移几十到上百米
- 不同地图显示位置不一致
经验建议:
- 明确系统“内部统一坐标系”
- 显示前再做坐标转换
- 不要在数据库里混存不同坐标系
6️⃣ 轨迹数据量增长速度惊人
简单算一笔账:
- 1 台设备:1 秒 1 个点 = 86,400 条 / 天
- 10 万设备:≈ 86 亿条 / 天(理论上)
坑点:
- 表很快爆炸
- 查询历史轨迹越来越慢
- 索引失效、SQL 超时
实践经验:
- 轨迹点一定要降频
- 按 deviceId + 时间分表
- 冷热数据分离
- 必要时引入 时序数据库 / 列式存储
7️⃣ 轨迹查询不是“查数据”,是“算数据”
常见误区:
- 只按时间查点,然后直接画线
现实需求:
- 停留点分析
- 行程切分
- 里程统计
- 轨迹纠偏
建议:
- 轨迹处理放在 服务端
- 不要把“脏数据”直接丢给前端
- 轨迹算法要和业务强绑定
8️⃣ 进出围栏≠坐标在不在多边形里
坑点:
- 设备在围栏边界来回抖动
- 频繁触发“进入 / 离开”事件
解决思路:
- 引入 缓冲区
- 引入 时间阈值
- 使用“连续多点判断”
9️⃣ 停留时间计算很容易算错
常见错误:
- 只算第一个点到最后一个点
- 忽略中途短暂漂移
正确思路:
- 基于时间连续性
- 允许短时间“出围栏再回来”
- 明确定义“停留”的业务规则
🔟 定位系统不是实时系统,而是“准实时系统”
现实情况:
- 网络抖动
- 设备断连
- 数据补传
坑点:
- 过度追求“实时”
- UI 和数据强绑定
经验建议:
- 接受“延迟”
- 明确数据状态(实时 / 补传 / 历史)
- 所有定位系统,都要有 容错设计









